Physical Objects Creation |
Physical Objects Creation
The editor supports a rich set of tools for working with body physics.
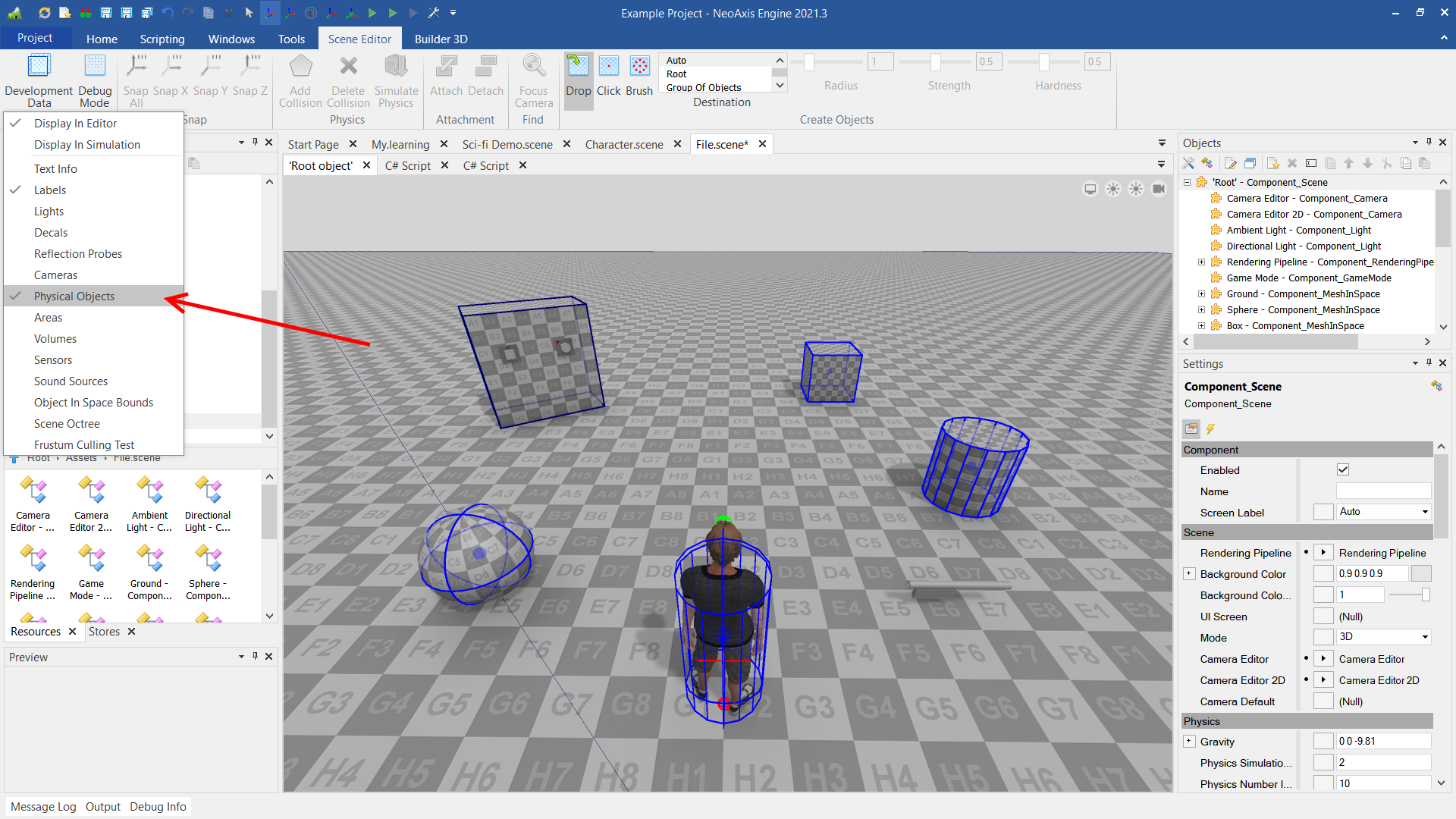
Physical objects are not displayed in the editor by default. In order to enable visualization, one needs to go to the Scene Editor tab in the Ribbon, and press Development Data, turn on the Physical Objects check box.
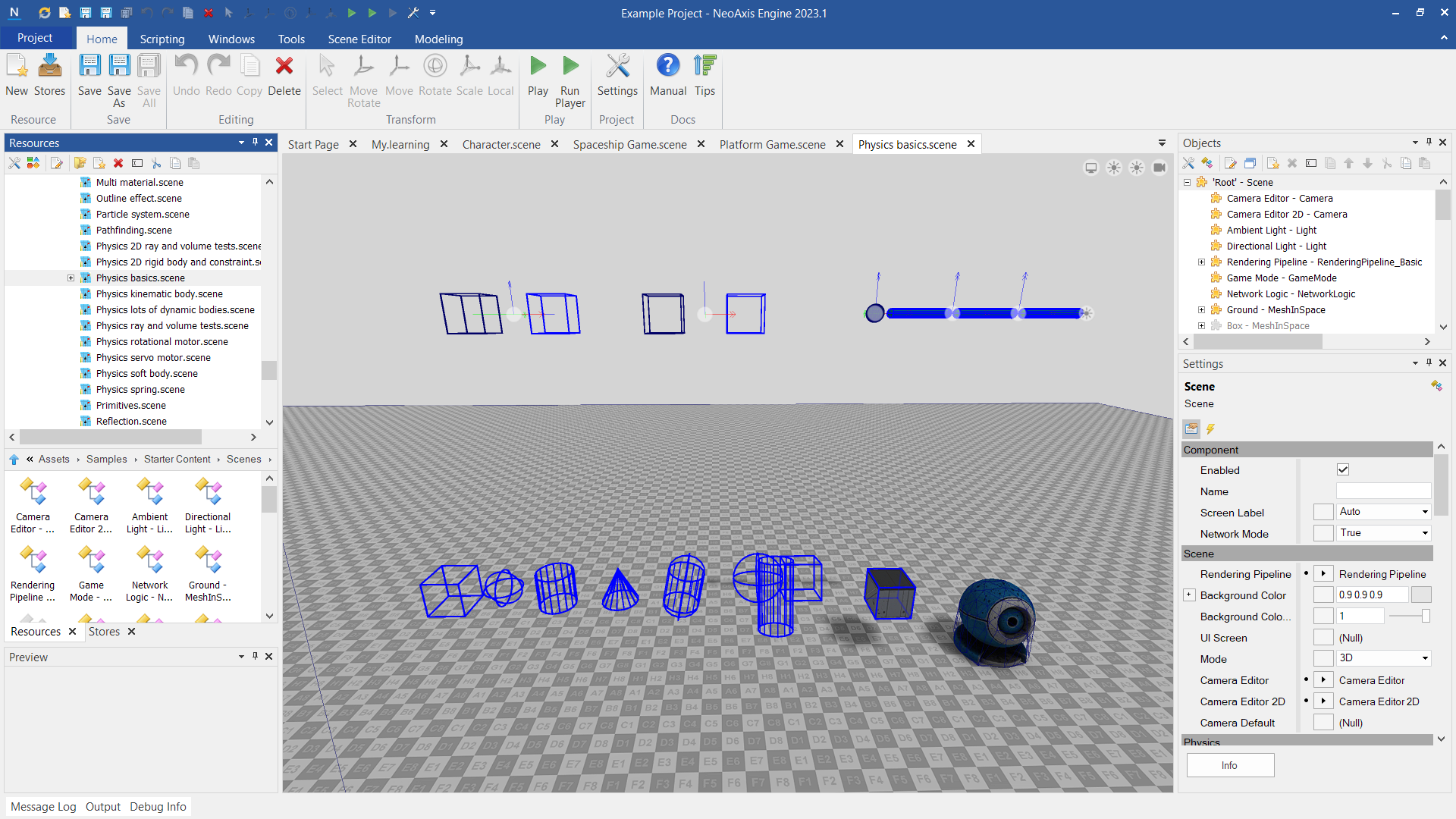
For a nice overview of rigid bodies and constraints one can take a look at 'Physics rigid body.scene' file, which can be found at 'Assets\Samples\Starter Content\Scenes'.
In order to run simulation, one should press the Play button in the Ribbon or in the Quick Access Toolbar.
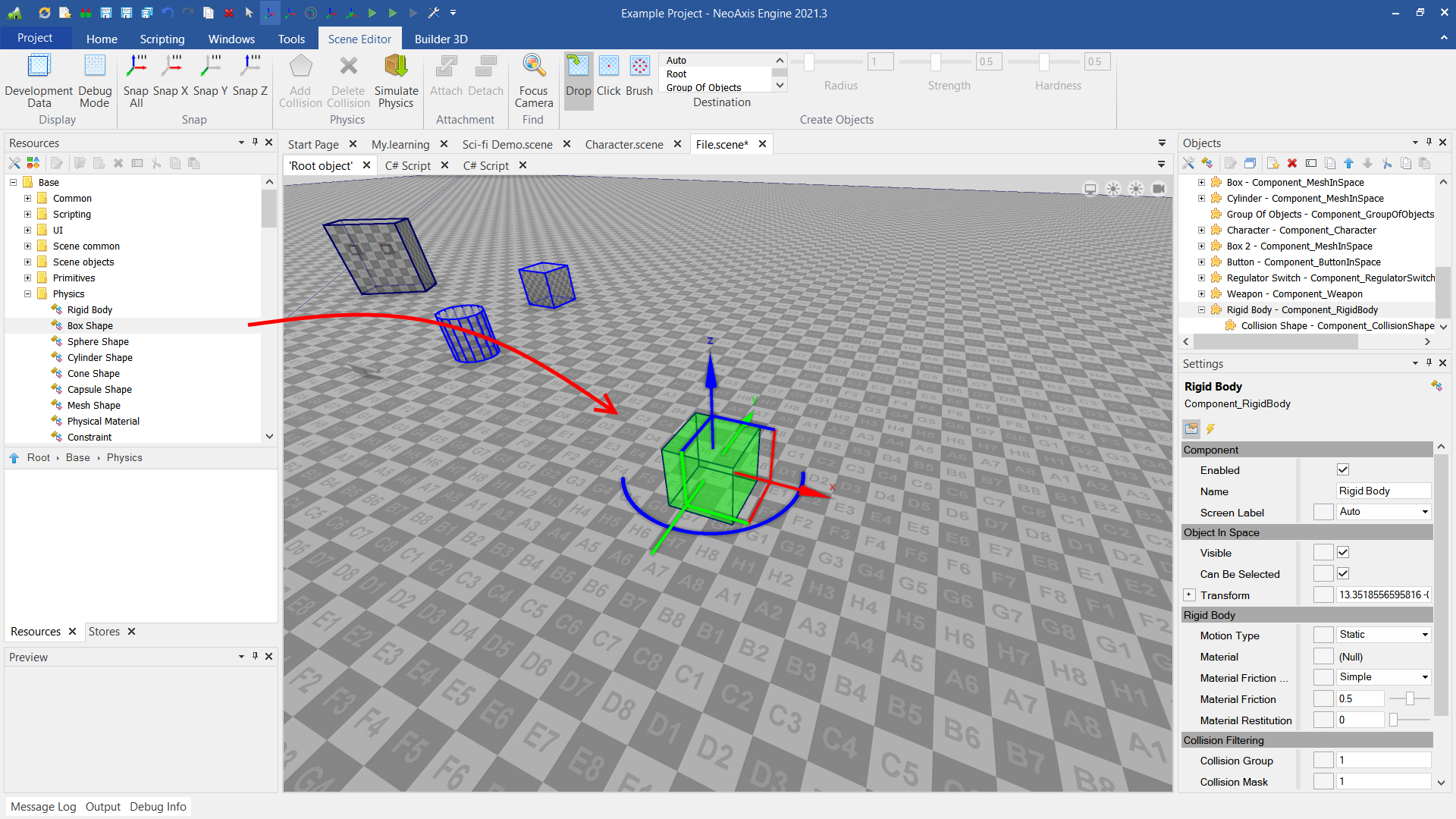
One can create Rigid Body by picking required figure, and dropping in the scene.
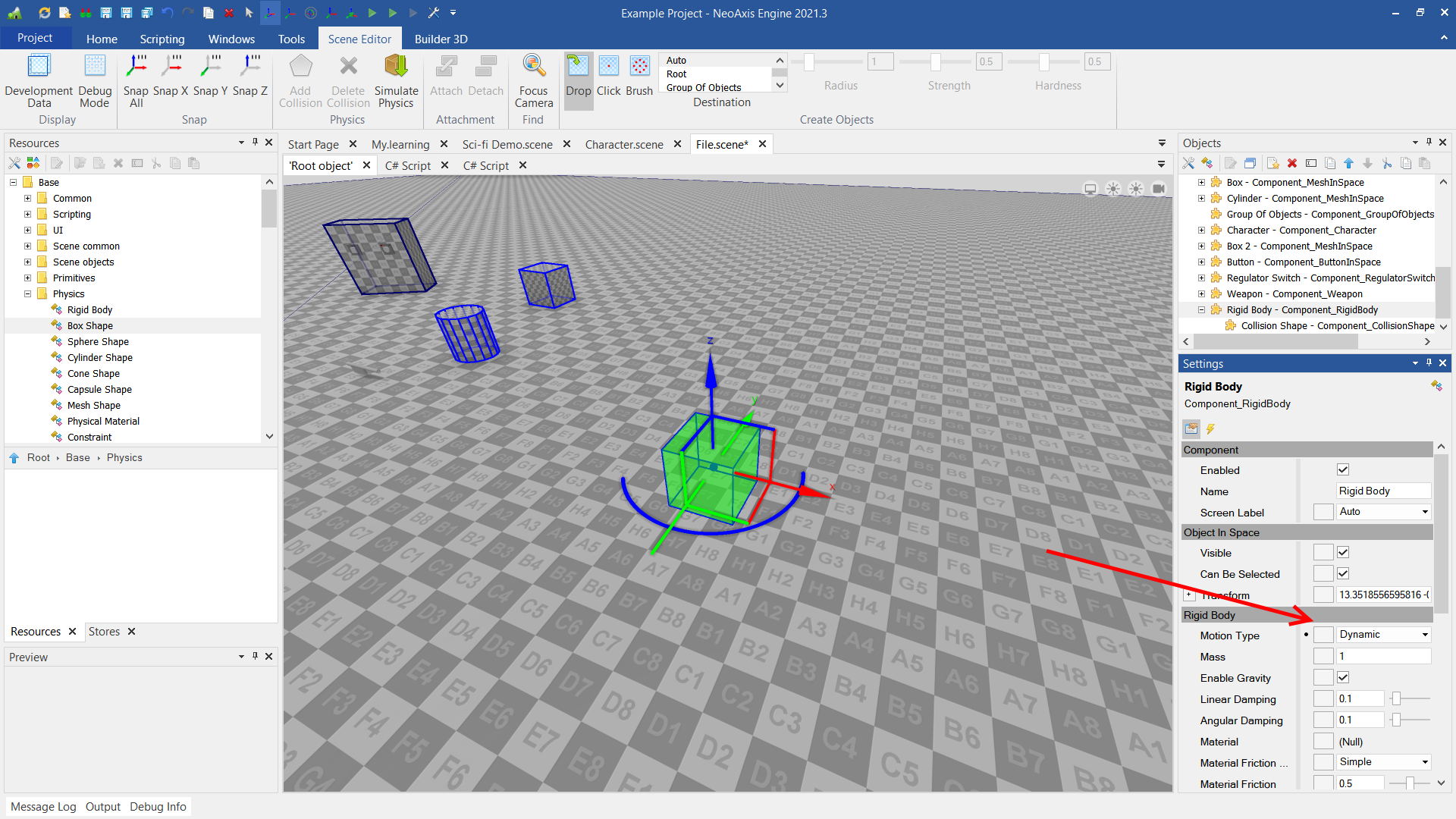
Also, body settings can be modified. For example, one can make body dynamical.
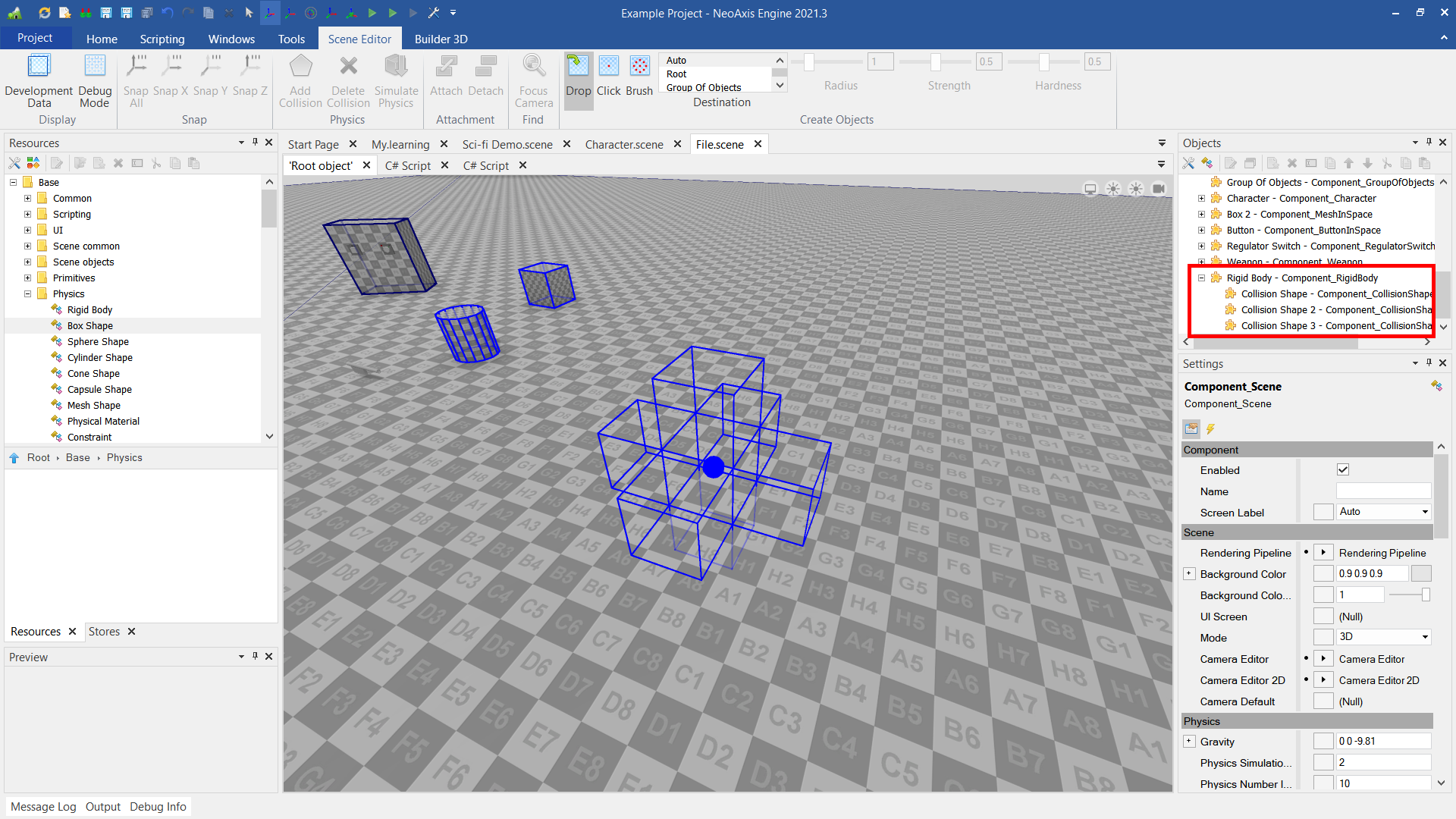
In addition to simple bodies, one can create complex rigid bodies. That can be achieved via placing additional shapes to the body.
| Name | Description |
|---|---|
| Motion Type | The type of motion used. |
| Motion Quality | The method of detecting collisions to solve issues on a high velocity. |
| Mass | The mass of the rigid body. |
| Gravity Factor | The factor of affect global gravity. |
| Linear Damping | The linear reduction of velocity over time. |
| Angular Damping | The angular reduction of velocity over time. |
| Material | The physical material used by the rigid body. |
| Material Friction | The amount of friction applied on the rigid body. |
| Material Restitution | The ratio of the final relative velocity to initial relative velocity of the rigid body after collision. |
| Linear Velocity | The initial linear velocity of the body. |
| Angular Velocity | The initial angular velocity of the body. |
| Display Contacts | Whether to display collected collision contacts data. |
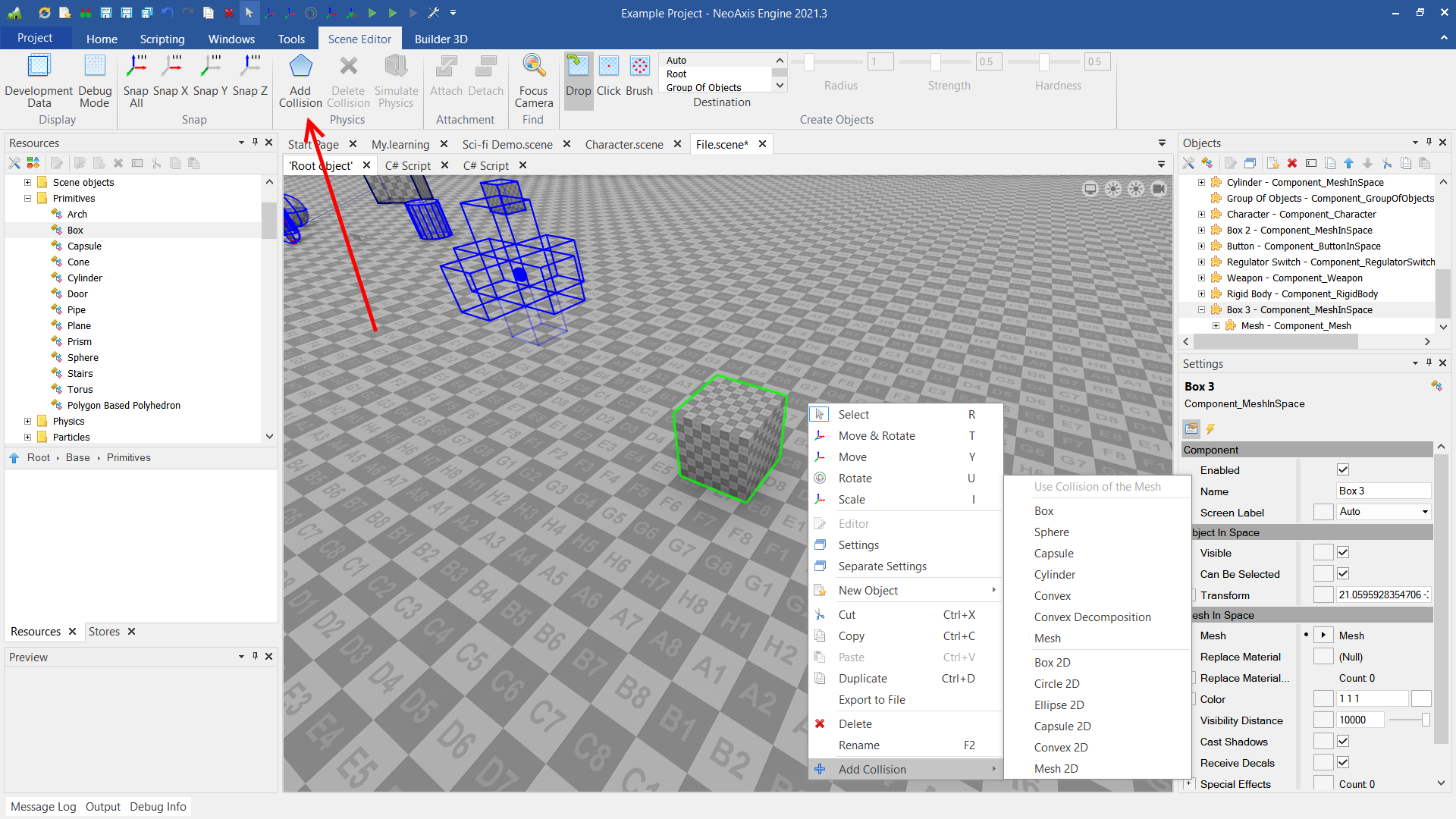
Another way to create rigid body is to press Add Collision button in Ribbon or via context menu. This works best when one needs to add physical body to the existing object in the scene.
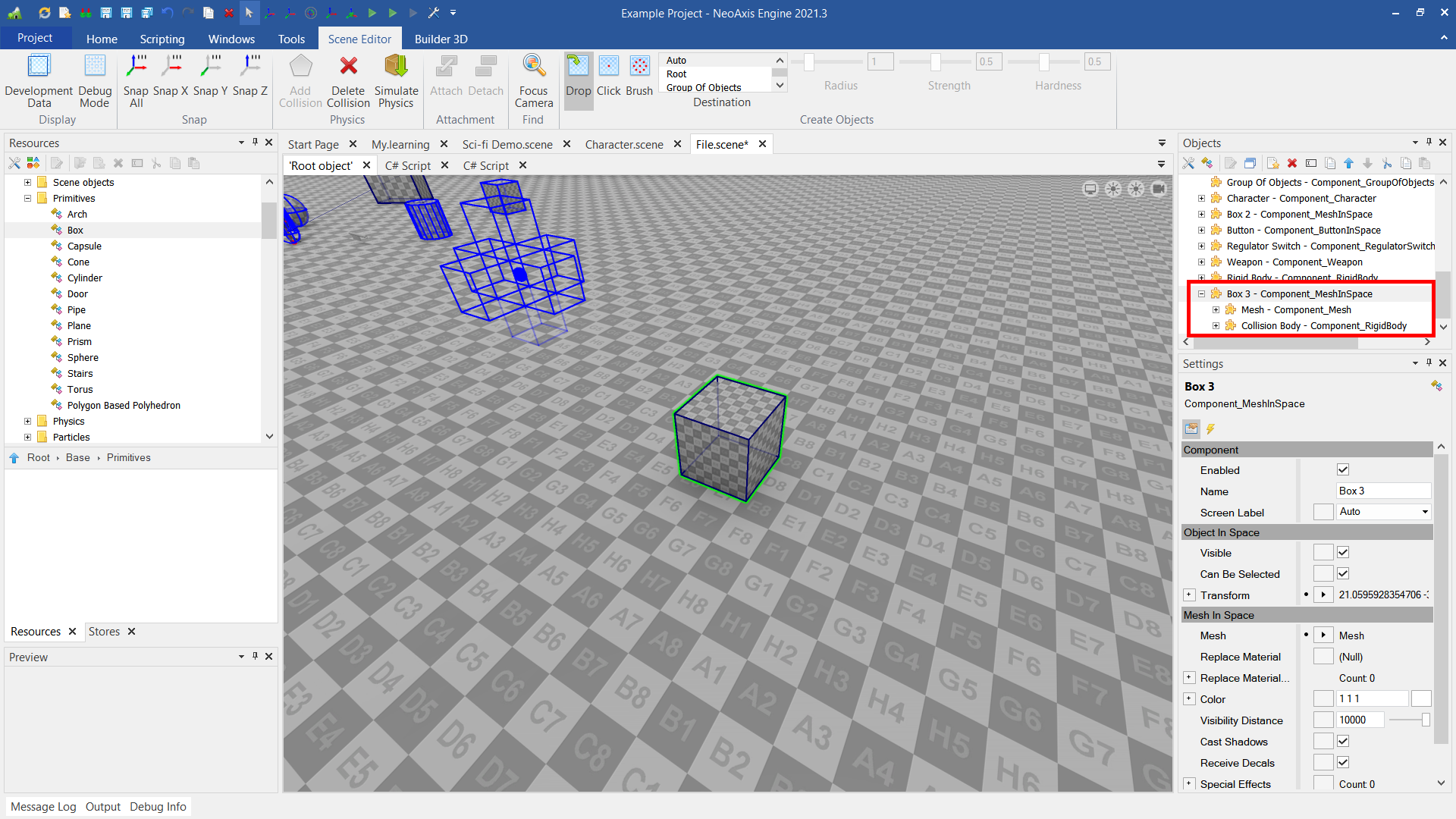
One can see that body now has nested object Collision Body, which could be tuned.
To create one needs to select two bodies, and select Add Constraint in the context menu.
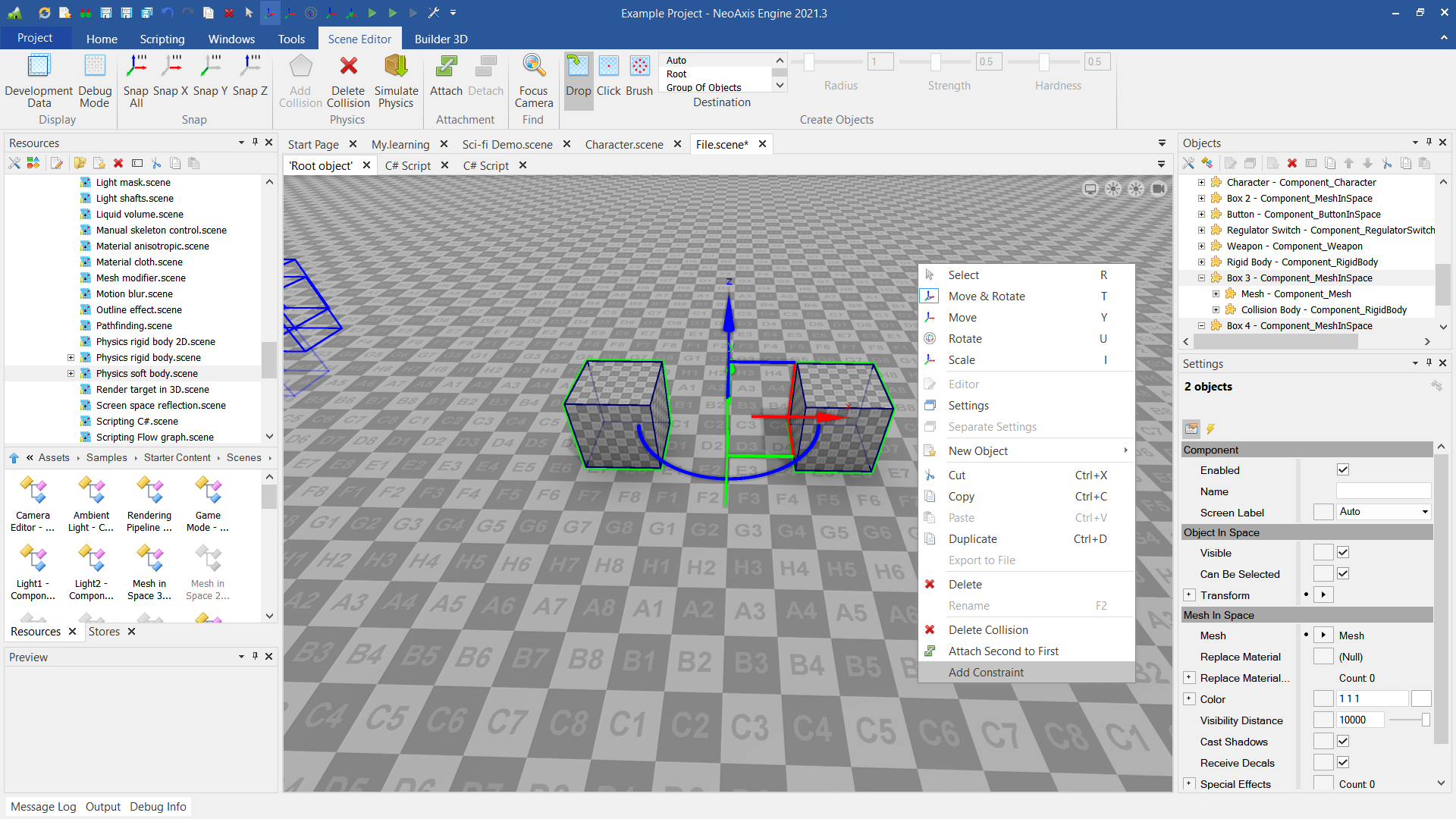
Select constraint type in the appeared window.
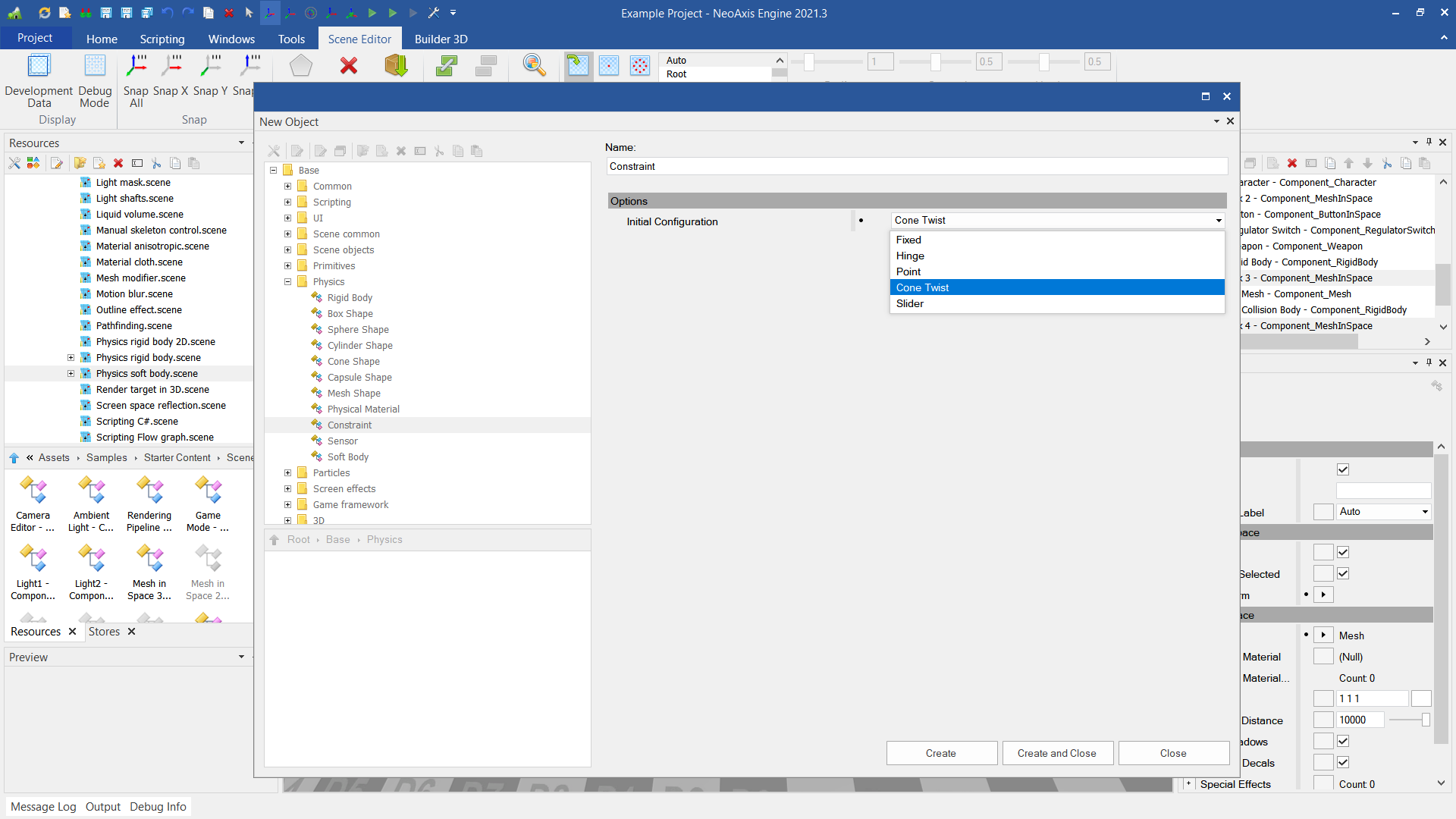
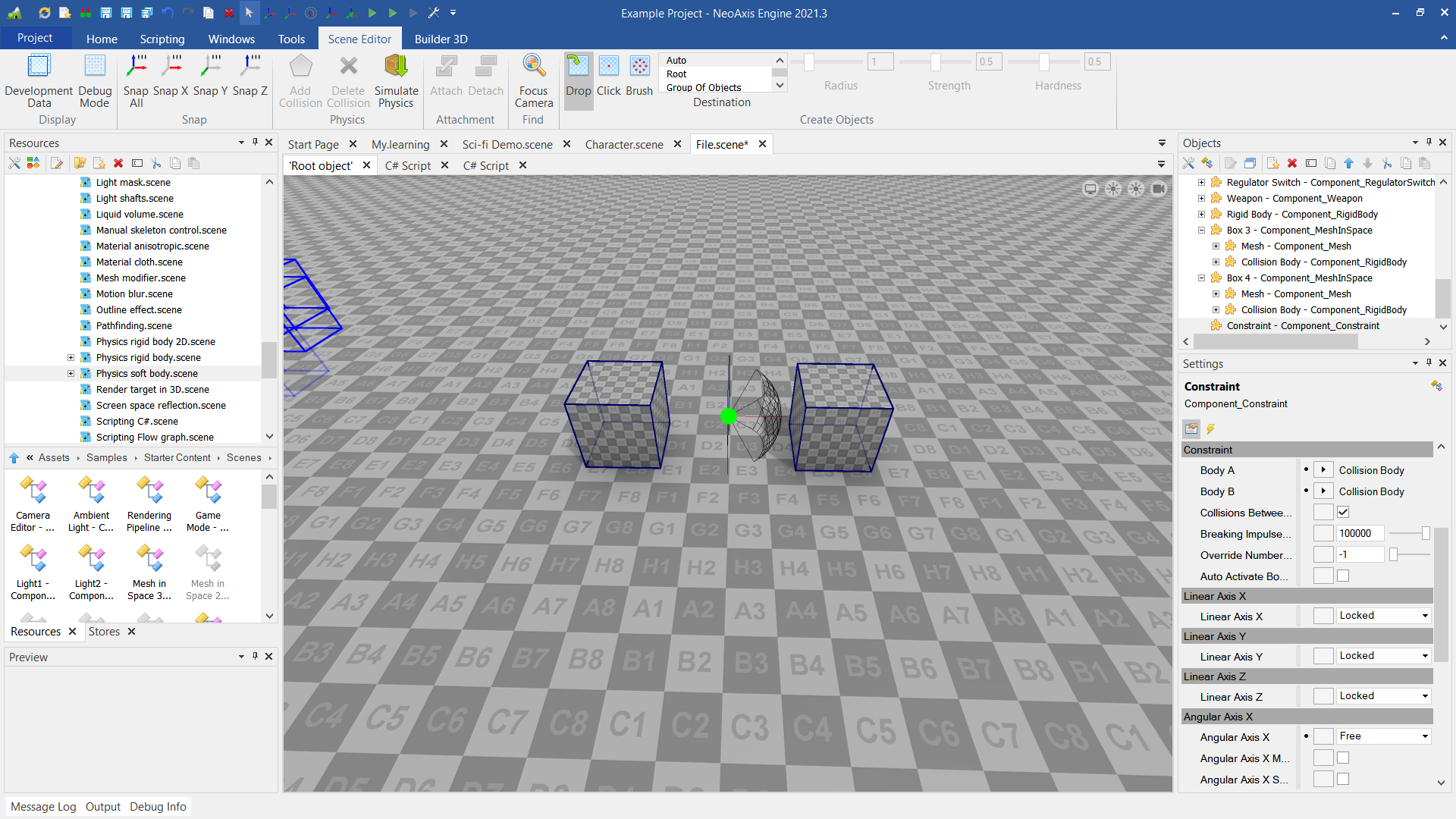
After creation, constraint can be moved to the desired place, its settings can be adjusted.
| Name | Description |
|---|
Soft Body is a body that can be deformed.
TO DO. Soft bodies right now are not supported.
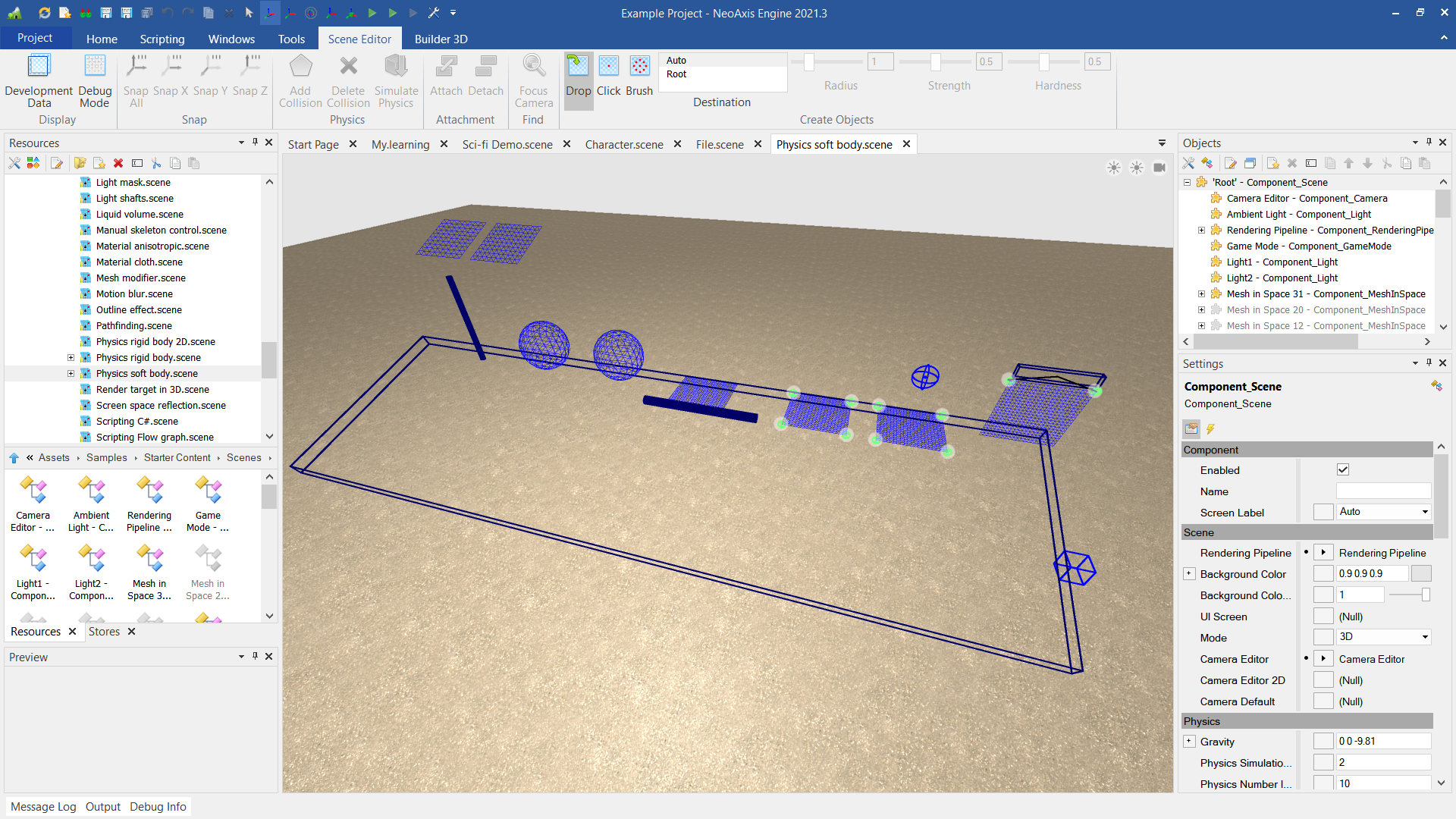
For an overview of soft bodies, one can take a look at "Physics soft body.scene" file, which can be found at Assets\Samples\Starter Content\Scenes.
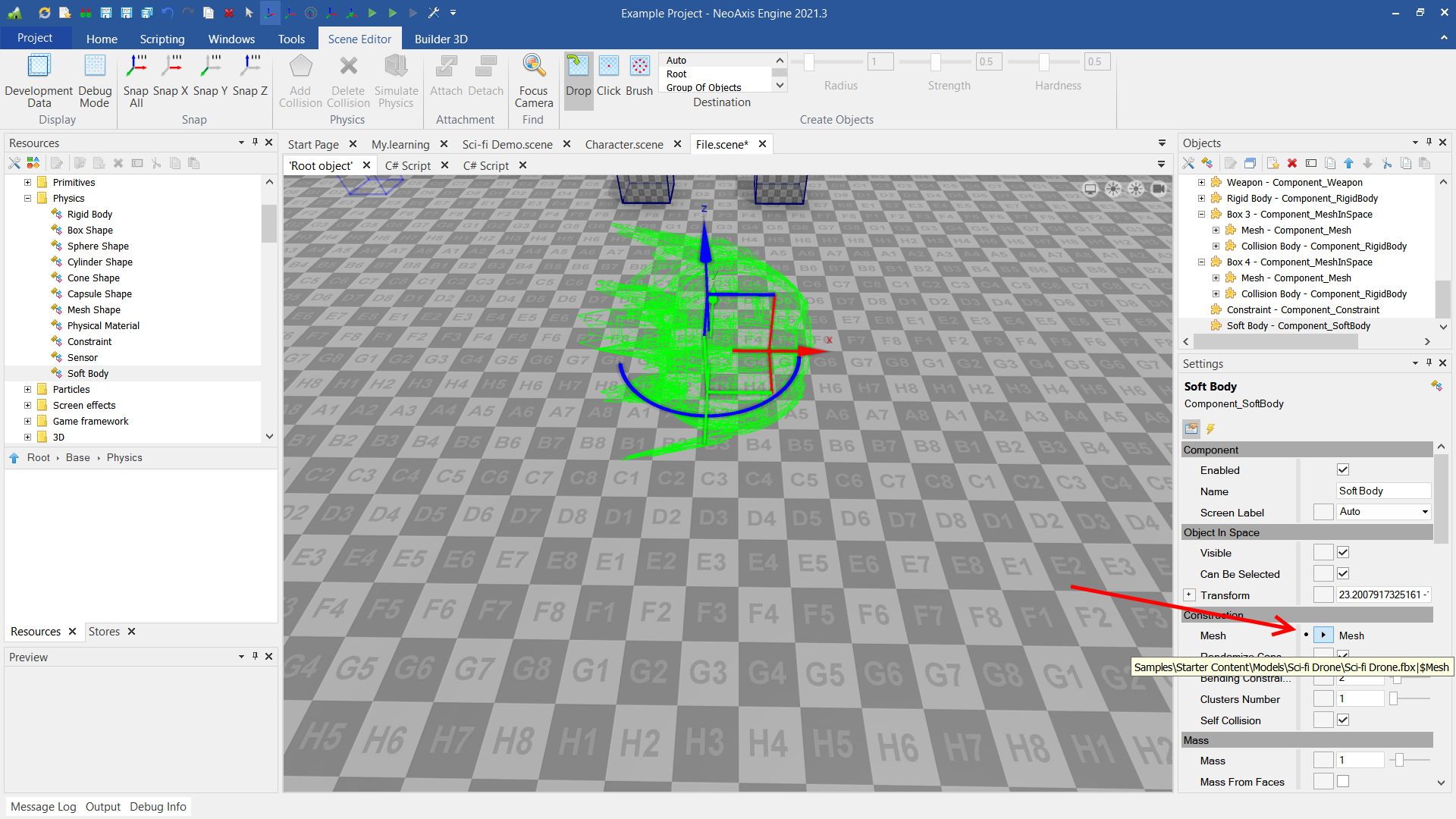
To create a soft body, one needs to create Soft Body object.
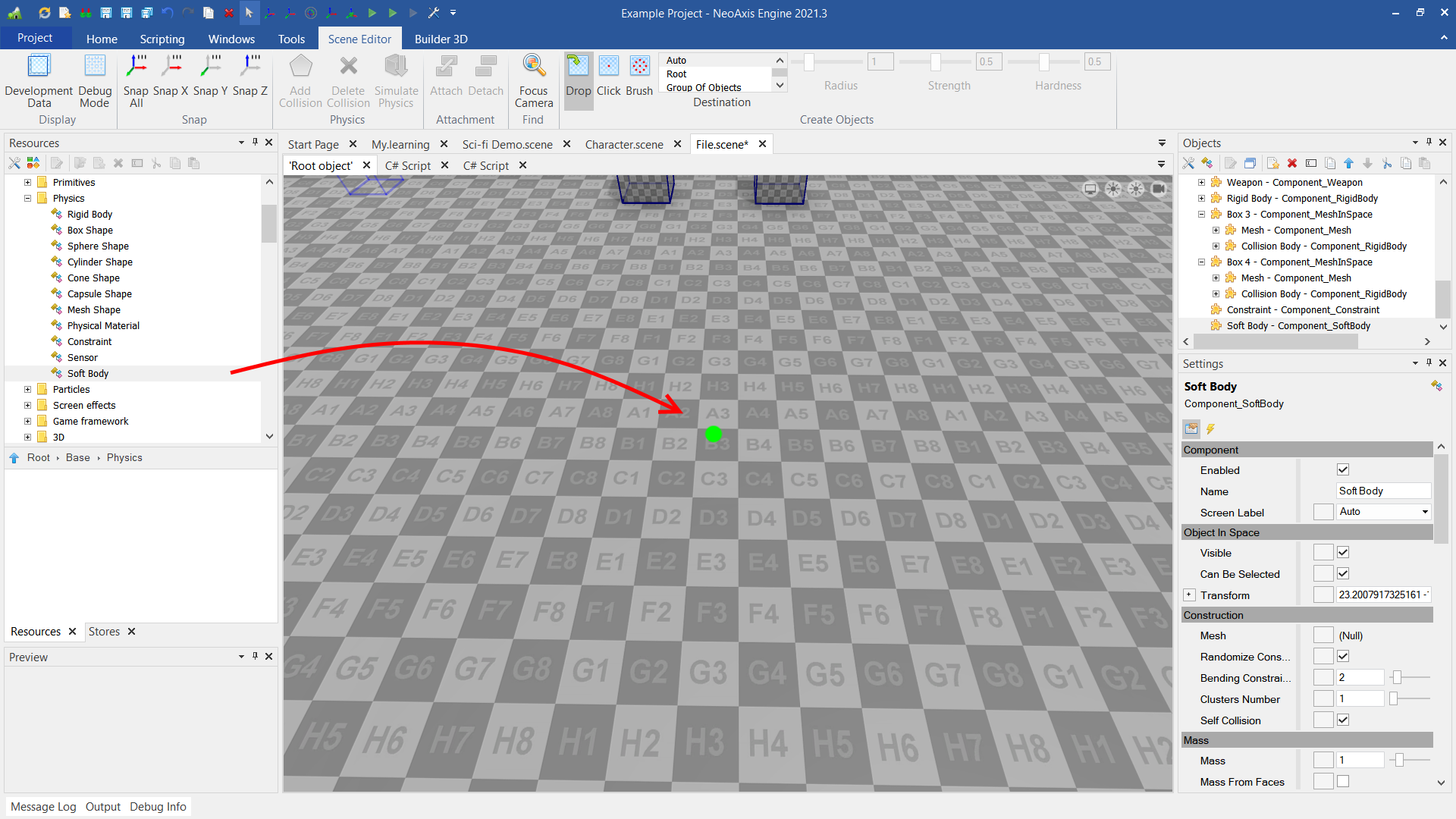
Then, one should set Mesh property.
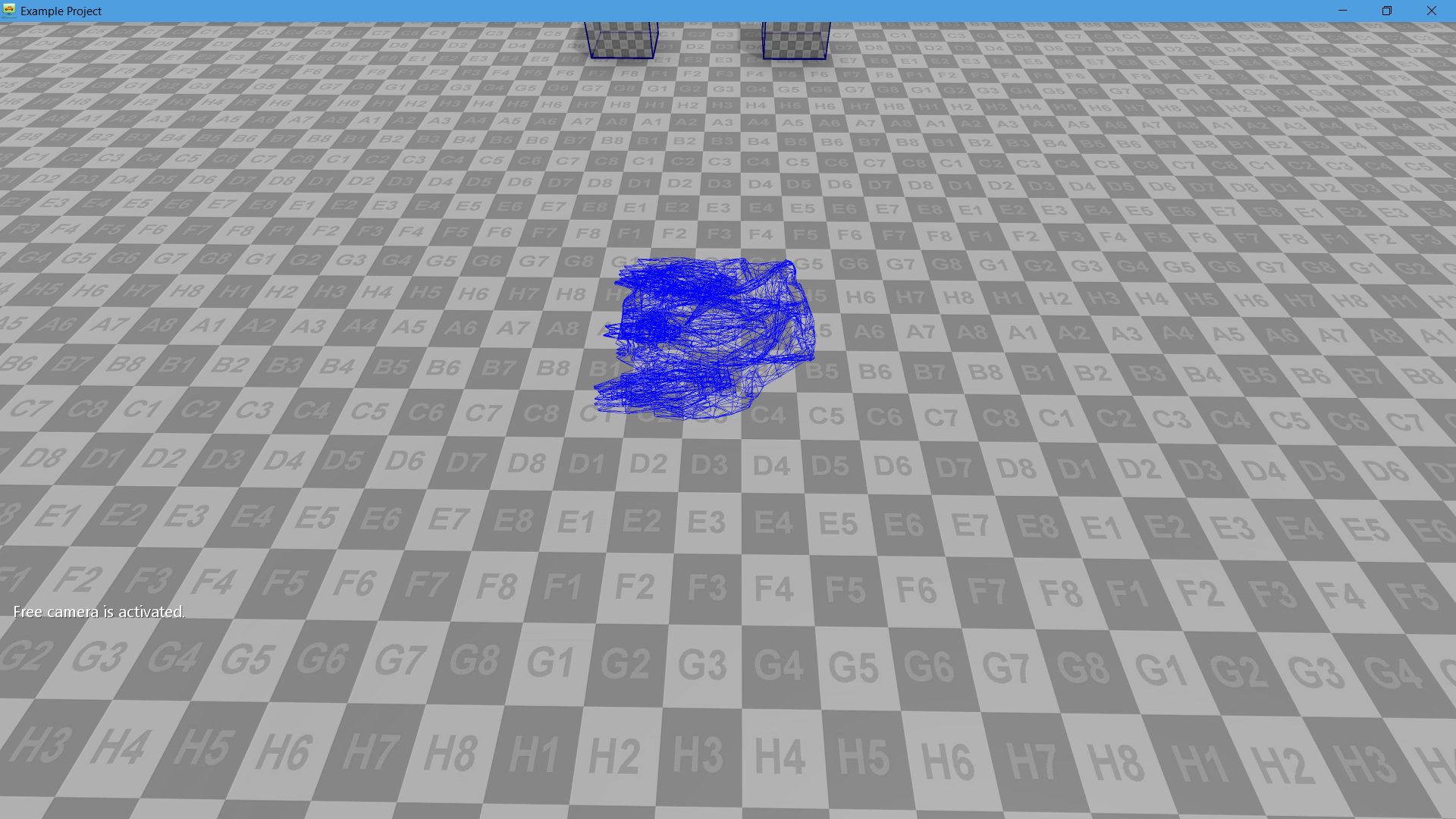
Result in the player:
Physical Material used to adjust physical body parameters during collision with other bodies. Generally, these parameters can be set in the physical body parameters. These parameters can be wrapped in a separate object, and assigned to several bodies. Material can be assigned via Material setting. At the moment, only rigid bodies are supported; soft bodies are not supported.
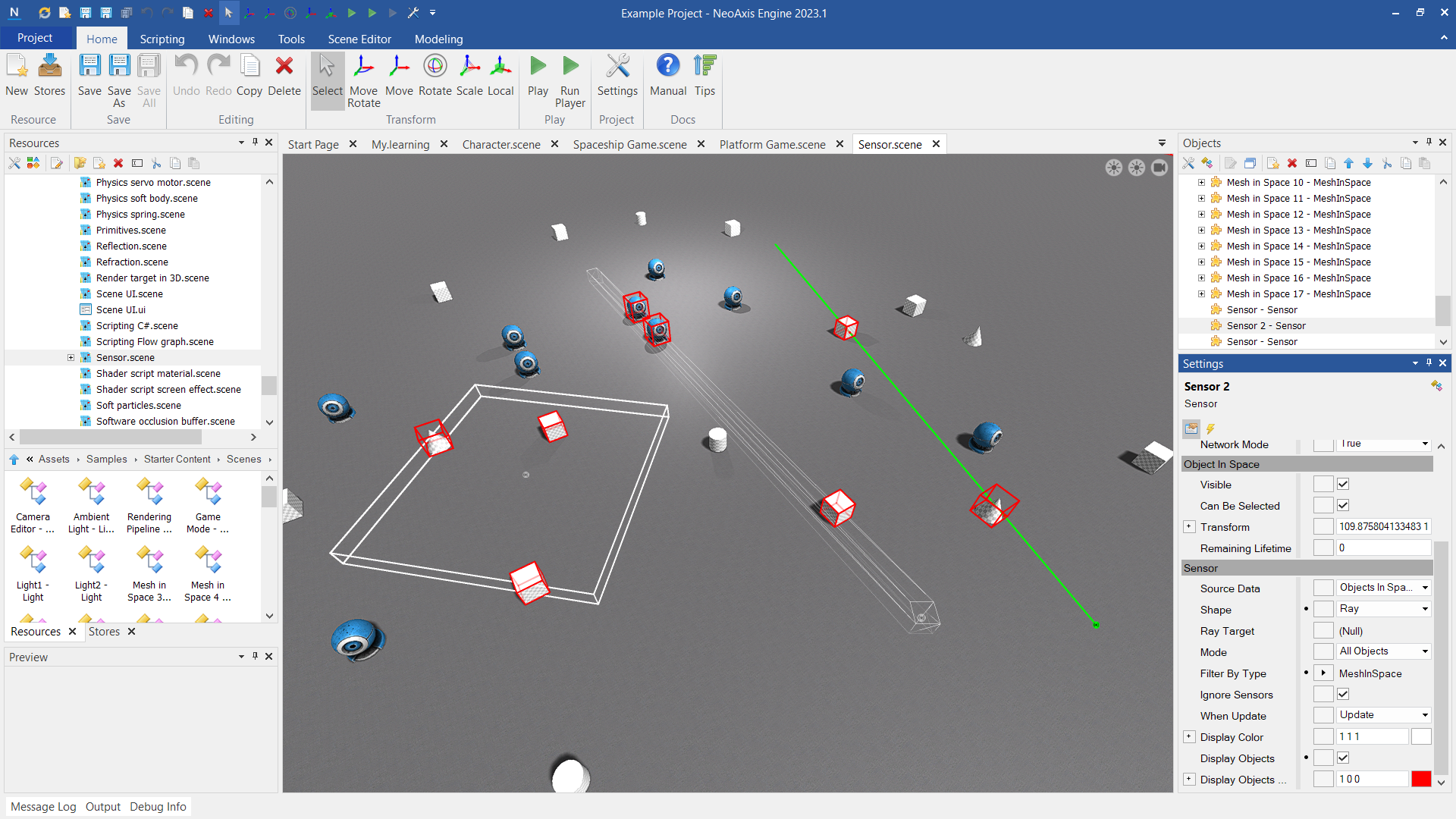
Sensor used to tune up event firing when bodies get into specific area.
For a nice overview of sensors one can take a look at 'Sensors.scene' file, which can be found at 'Assets\Samples\Starter Content\Scenes'.
- No collision between soft bodies and multi shape rigid mesh shapes or when a mesh shape TransformRelativeToParent is not a default value.